Rigid Body Overview
Introduction
This chapter will introduce the fundamentals of simulating rigid body dynamics using the NVIDIA PhysX engine.
Rigid Body Object Model
PhysX uses a hierarchical rigid body object/actor model.
Class |
Extends |
Functionality |
|---|---|---|
N/A |
Reflection/querying object types. |
|
Actor name, actor flags, dominance, clients, aggregates, query world bounds. |
||
Shapes, transforms, and querying constraints. |
||
Mass, inertia, velocities, damping, forces, body flags. |
||
Interface for static body in the scene. This kind of body has implicit infinite mass/inertia. |
||
Interface for dynamic rigid body in the scene. Introduces support for kinematic targets and object sleeping. |
||
Interface for a dynamic rigid body link in a PxArticulation. Introduces support for querying the articulation and adjacent links. |
||
Defines interface for a PxArticulation. Effectively a container referencing multiple PxArticulationLink rigid bodies. |
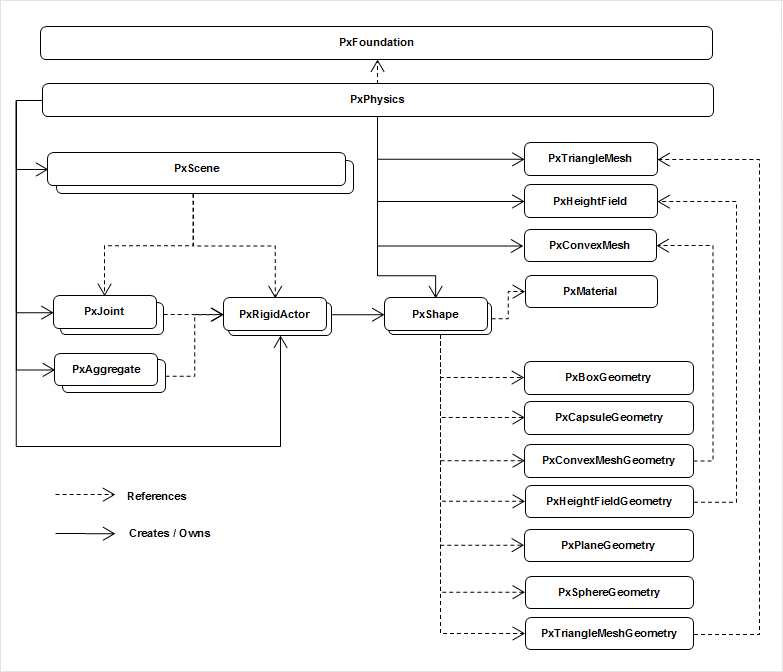
The following diagram shows the relationship between the main types involved in the rigid body pipeline:
Creating Rigid Actors
Rigid actors along with their shapes can be created through the PxPhysics instance:
PxShapeFlags shapeFlags = PxShapeFlag::eVISUALIZATION | PxShapeFlag::eSCENE_QUERY_SHAPE | PxShapeFlag::eSIMULATION_SHAPE;
PxMaterial* materialPtr = &material;
//plane rigid static
PxRigidStatic* rigidStatic = mPhysics.createRigidStatic(PxTransformFromPlaneEquation(PxPlane(PxVec3(0.f, 1.f, 0.f), 0.f)));
{
PxShape* shape = mPhysics.createShape(PxPlaneGeometry(), &materialPtr, 1, true, shapeFlags);
rigidStatic->attachShape(*shape);
shape->release(); // this way shape gets automatically released with actor
}
//single shape rigid dynamic
PxRigidDynamic* rigidDynamic = mPhysics.createRigidDynamic(PxTransform(PxVec3(0.f, 2.5f, 0.f)));
{
PxShape* shape = mPhysics.createShape(PxBoxGeometry(2.f, 2.f, 2.f), &materialPtr, 1, true, shapeFlags);
rigidDynamic->attachShape(*shape);
shape->release(); // this way shape gets automatically released with actor
}
mScene.addActor(*rigidStatic);
mScene.addActor(*rigidDynamic);
More details on collision geometry and shapes are provided in Rigid Body Collision. In the case of single shape actors the PxRigidActorExt::createExclusiveShape() function from PxRigidActorExt.h can be used:
//plane rigid static
PxRigidStatic* rigidStatic = mPhysics.createRigidStatic(PxTransformFromPlaneEquation(PxPlane(PxVec3(0.f, 1.f, 0.f), 0.f)));
PxRigidActorExt::createExclusiveShape(*rigidStatic, PxPlaneGeometry(), material);
//single shape rigid dynamic
PxRigidDynamic* rigidDynamic = mPhysics.createRigidDynamic(PxTransform(PxVec3(0.f, 2.5f, 0.f)));
PxRigidActorExt::createExclusiveShape(*rigidDynamic, PxBoxGeometry(2.f, 2.f, 2.f), material);
mScene.addActor(*rigidStatic);
mScene.addActor(*rigidDynamic);
Helper functions in PxSimpleFactory.h can further simplify the setup for common cases:
//plane rigid static
PxRigidStatic* rigidStatic = PxCreatePlane(mPhysics, PxPlane(PxVec3(0.f, 1.f, 0.f), 0.f), material);
//single shape rigid dynamic
PxRigidDynamic* rigidDynamic = PxCreateDynamic(mPhysics, PxTransform(PxVec3(0.f, 2.5f, 0.f)), PxBoxGeometry(2.f, 2.f, 2.f), material, 1.f);
mScene.addActor(*rigidStatic);
mScene.addActor(*rigidDynamic);
The helpers in PxSimpleFactory.h further support creating kinematic actors, cloning shapes, actors and scaling actors.
Simulation
For the actual simulation rigid body objects need to be added to a scene and that scene will be stepped forwards in time. See section The Simulation Loop.