Python: Semantic Segmentation#
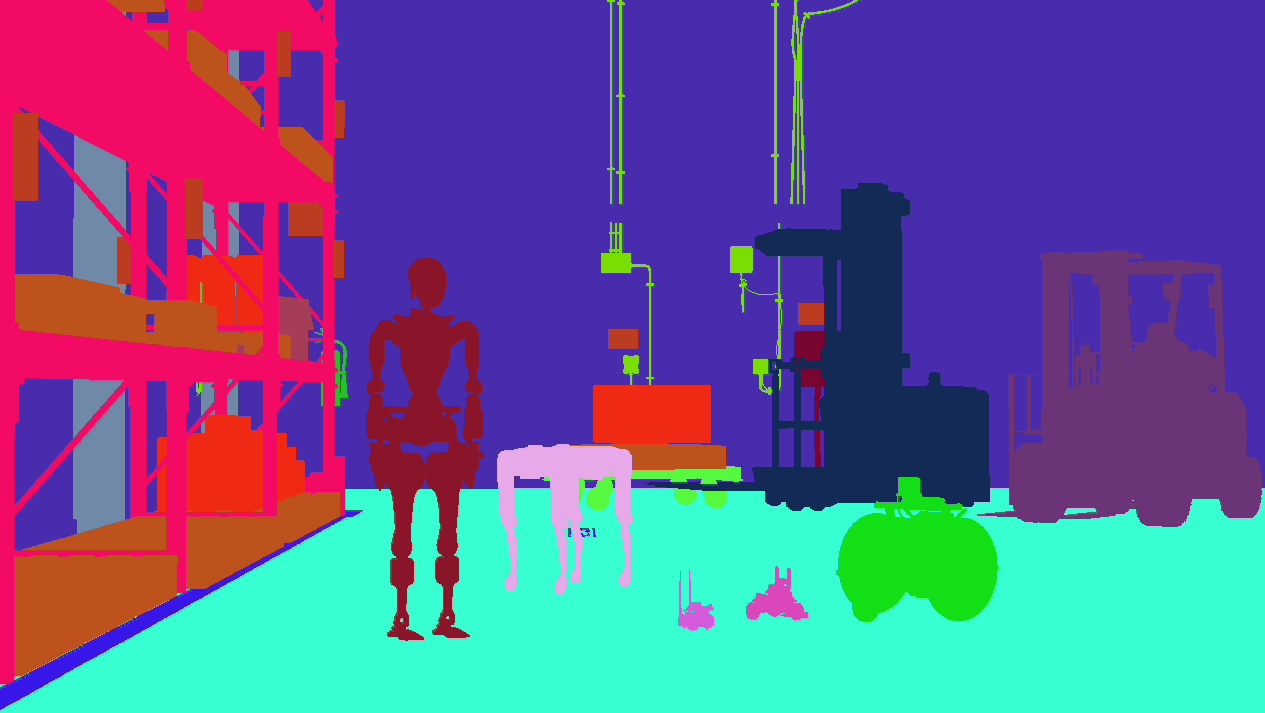
Renders semantic segmentation from the bundled ovrtx-robot-lineup.usda scene through /World/Camera and streams labeled results to rerun.io.
The example uses an inline USDA root layer with a relative subLayers arc to the source scene. The inline layer authors semantic-label overrides for each top-level robot payload, a RenderProduct targeting /World/Camera, and one RenderVar for each requested AOV, so the original USD file is left untouched.
“Create a Python example that composes an existing scene with semantic label overrides and camera annotation outputs, renders several camera AOVs including semantic segmentation and its ID map, decodes metadata into human-readable labels, logs a useful visual layout to a viewer, and supports headless image export.”
Prerequisites#
Python 3.10-3.13
NVIDIA RTX-capable GPU
Supported NVIDIA driver
Internet access to download the remote payloads referenced by
ovrtx-robot-lineup.usdaUnsandboxed runtime execution
Running#
cd examples/python/semantic-segmentation
uv run main.py
Options#
Flag |
Description |
|---|---|
|
Set the render resolution |
|
Render warmup frames before logging |
|
Set the renderer step delta and Rerun simulation timestamp interval |
|
Set the number of columns in the Rerun AOV grid blueprint |
|
Render a different USD file |
|
Do not spawn Rerun; write display PNGs for image AOVs to |
The example decodes SemanticIdMap before logging SemanticSegmentation. It remaps renderer semantic IDs into compact 16-bit Rerun class IDs, logs an AnnotationContext with the semantic labels, and displays the segmentation image in the Rerun blueprint grid.
The first step from a newly built application will block for 1-2 minutes while shaders are compiled and cached.