Python: Radar Sensor#
This example loads radar_example.usda, renders a radar PointCloud,
maps the composite render variable to CPU memory, and visualizes detections in
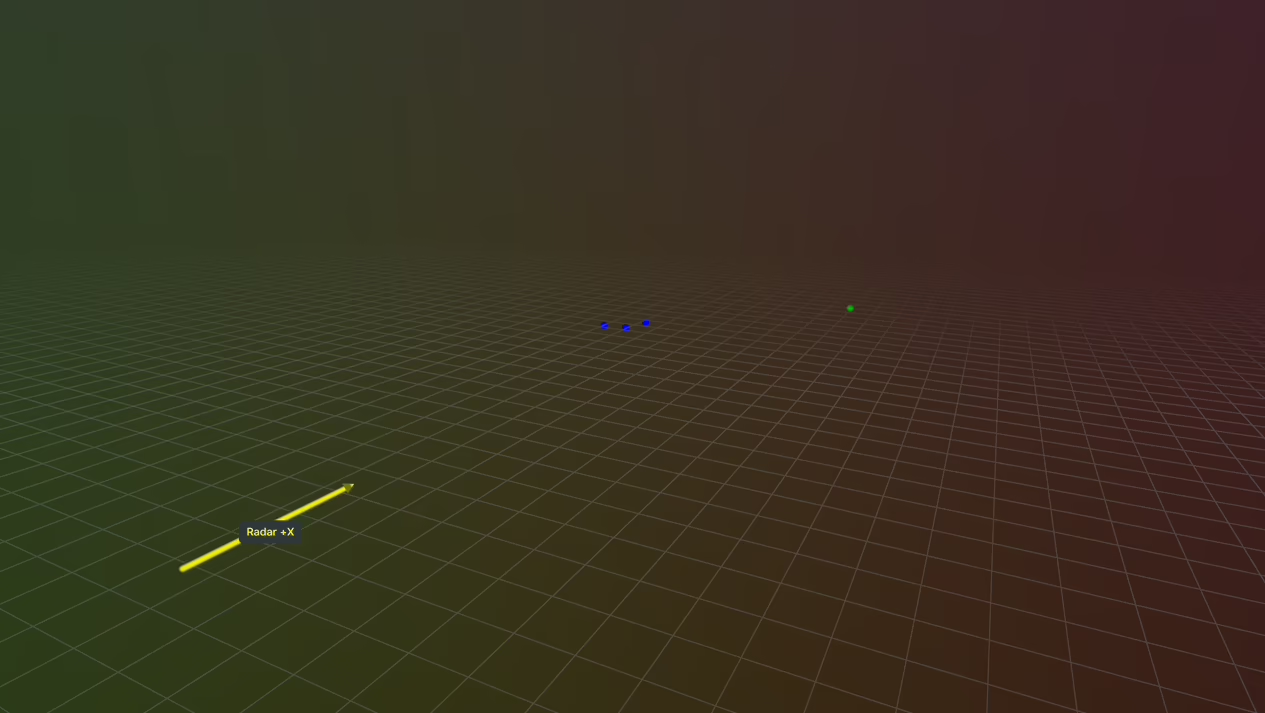
rerun.io. Point color is derived from signed
RadialVelocityMs: blue is approaching the sensor, green is near zero, and
red is receding.
This example retains the deprecated standalone population APIs because attached ovstage rendering in ovrtx 0.4 does not preserve the radar motion output demonstrated here. Use ovstage for CPU stage workflows that do not depend on radar motion history.
The scene is Z-up and contains a radar at (0, 0, 1) rotated to look along
world +X, an asphalt ground plane, a moving steel cube, and a fixed concrete
cube. The moving cube advances toward the radar across 10 simulation steps.
“Create a Python sensor example that loads a scene containing a configured radar and moving target, advances scene time over multiple steps, reads valid detections and signed radial velocity, prints per-step summaries, and optionally visualizes detections with velocity-based colors.”
Prerequisites#
Python 3.10-3.13
Running#
cd examples/python/radar
uv run main.py
Options#
Flag |
Description |
|---|---|
|
Load a different USDA scene |
|
Number of animated radar steps |
|
Disable Rerun visualization and print only the per-step summary |
|
Write a Rerun recording instead of spawning a viewer |
Expected console output values vary, but a successful run prints per-step valid point counts and radial velocity min/max values.